[5분 로봇] Against Appearance Changes 2
on 5min-Robot
https://www.youtube.com/watch?v=s8XV1Y6opig&t=24s
Oxford의 Paul Newman 교수님 연구실의 GAN을 이용항 appearance change에 대처하는 연구
예전 ICRA 2018에서 발표할때 사용했던 슬라이드
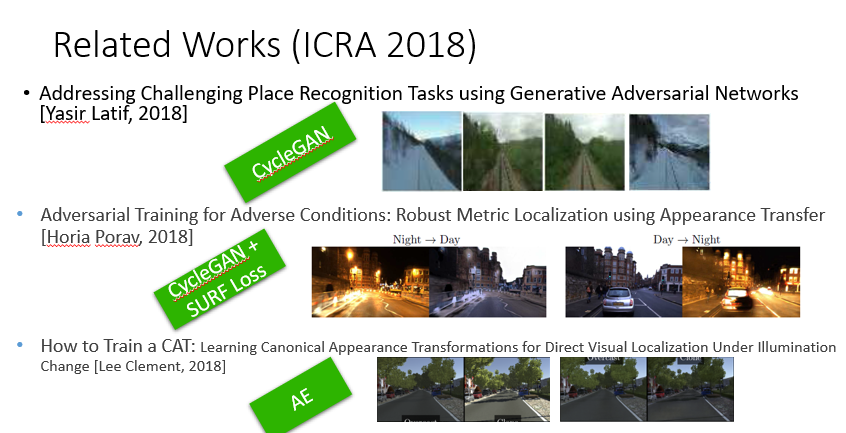
앞의 포스팅과 마찬가지로 계절이나 날시 변화와 같은 appearance change에 대응하는 가장 직관적인 방법은 바로 Image-to-image translation을 이용해서 입력 영상을 원하는 appearance를 가지도록 변화시키는 것이다.
로봇 쪽 학회에서는 2018년 ICRA에서 관련 연구들이 많이 소개되었는데, 위 그림, 또는 아래의 링크와 같이 Image-to-image translation을 통해서 visual localization 성능을 높이는 연구들을 진행하였다.
각 연구별로 방법은 조금씩 다르나 기본적인 흐름은 Deep Generative Model (GAN이나 VAE 와 같은)을 이용하여 영상을 변화시키는 것이다. 즉, 기존에 획득한 데이터가 낮!에 획득하였고 현재 자동차가 밤에 주행하면서 이전 데이터 상에 위치 인식을 시키고 싶을때 현재 데이터를 낮 영상과 같이 변화 시켜서 위치 인식 성능을 높이는 것이다.